Z życia mechanika: magistrala danych CAN cz. 1.

- Zwiększająca się ilość czujników i sterowników w samochodzie zmusiły konstruktorów do opracowania systemu przesyłu danych.
- Prędkość przesyłu danych po magistrali CAN może przekraczać 1000 kbit/s.
- Funkcjonowanie samochodowej magistrali CAN polega na transmisji danych między sterownikami za pomocą dwóch przewodów.
- Więcej informacji o polskiej (i nie tylko) branży aftermarketowej i motoryzacyjnej znajdziesz na stronie głównej Motofaktora. Jeśli chcesz być na bieżąco z najważniejszymi wiadomościami z branży – zapisz się na nasz newsletter.
Współcześnie magistrala CAN stała się powszechnym protokołem wymiany danych, nawet w pojazdach z silnikami o niewielkiej pojemności skokowej. Bez wiedzy o zasadzie działania i znajomości architektury sieci CAN, jej efektywna naprawa pozostaje mało skuteczna i niezwykle czasochłonna.
Dlaczego właśnie magistrala CAN?
Aby w pełni zrozumieć zasadę funkcjonowania transmisji danych typu CAN (z języka angielskiego Controller Area Network) należy cofnąć się do momentu, gdy zrodziła się idea zastosowania tego typu rozwiązania w pojazdach samochodowych. Przełom lat 80/90 ubiegłego wieku charakteryzował niezwykle dynamiczny rozwój układów elektronicznych, wśród których znalazły się mikroprocesorowe systemy wtrysku paliwa i zapłonu, pierwsze generacje układów ABS czy systemy sterowania przekładnią automatyczną. Każdy z tych układów, do prawidłowego funkcjonowania wymagał zaadoptowania grupy sensorów oraz nastawników odpowiedzialnych za dostarczenie sygnałów do poszczególnych sterowników oraz przesył sygnału zwrotnego do nadzorowania funkcji wykonawczych.
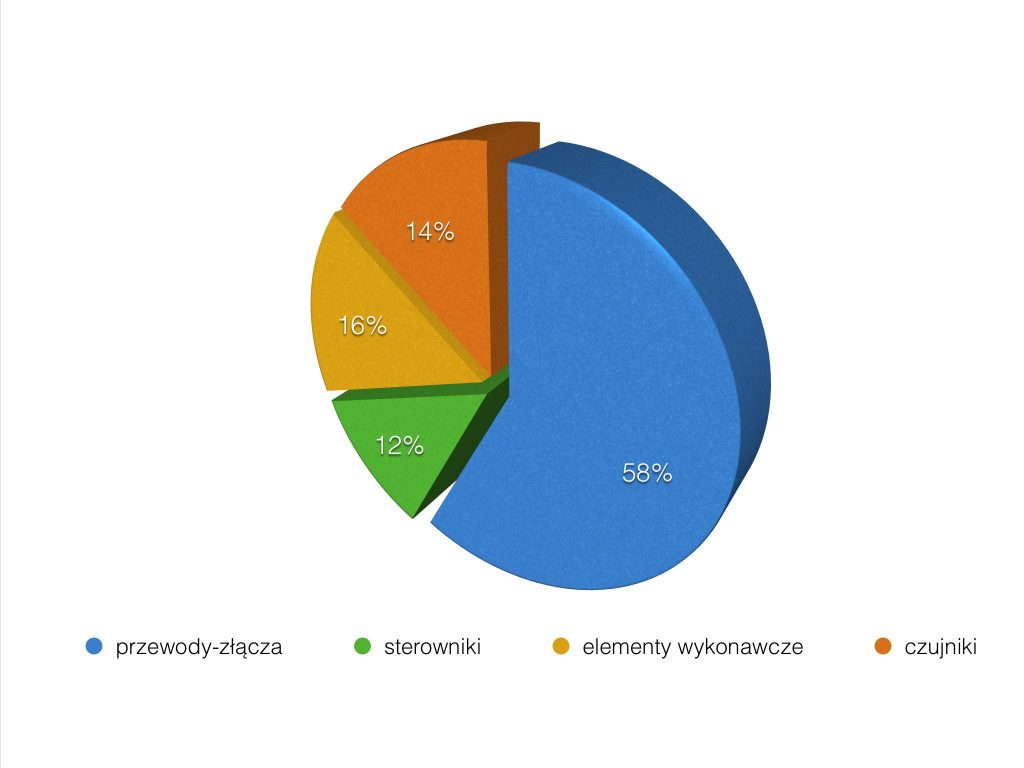
Z biegiem czasu poważne wyzwanie zaczęło stanowić odpowiednie zaprojektowanie instalacji elektrycznej pojazdu – w której liczba złącz wtykowych, przewodów i sterowników zaczęła wpływać na masę samochodu oraz stanowić źródło potencjalnych usterek instalacji elektrycznej (ilustracja 1).
Inżynierowie zaczęli poszukiwać sposobu na ograniczenie tak dużej ilości podzespołów instalacji elektrycznej i swoją uwagę skupili na pomyśle zastosowanym w procesie wymiany danych wykorzystywanym powszechnie w komputerach osobistych.
Wzorując się na wspomnianej strategii wymiany danych, obrano kierunek opracowania przesyłu informacji pomiędzy sterownikami pojazdu, który opierałby się na transmisji sygnału cyfrowego za pośrednictwem tradycyjnych miedzianych przewodów instalacji elektrycznej. Wprowadzony w latach 90 ubiegłego wieku standard wymiany danych za pośrednictwem magistrali CAN Bus w pełni zrealizował początkowe zamierzenia inżynierów.
Transmisję danych poprzez CAN charakteryzuje kilka czynników jak i zalet wymienionych w poniższym zestawieniu.
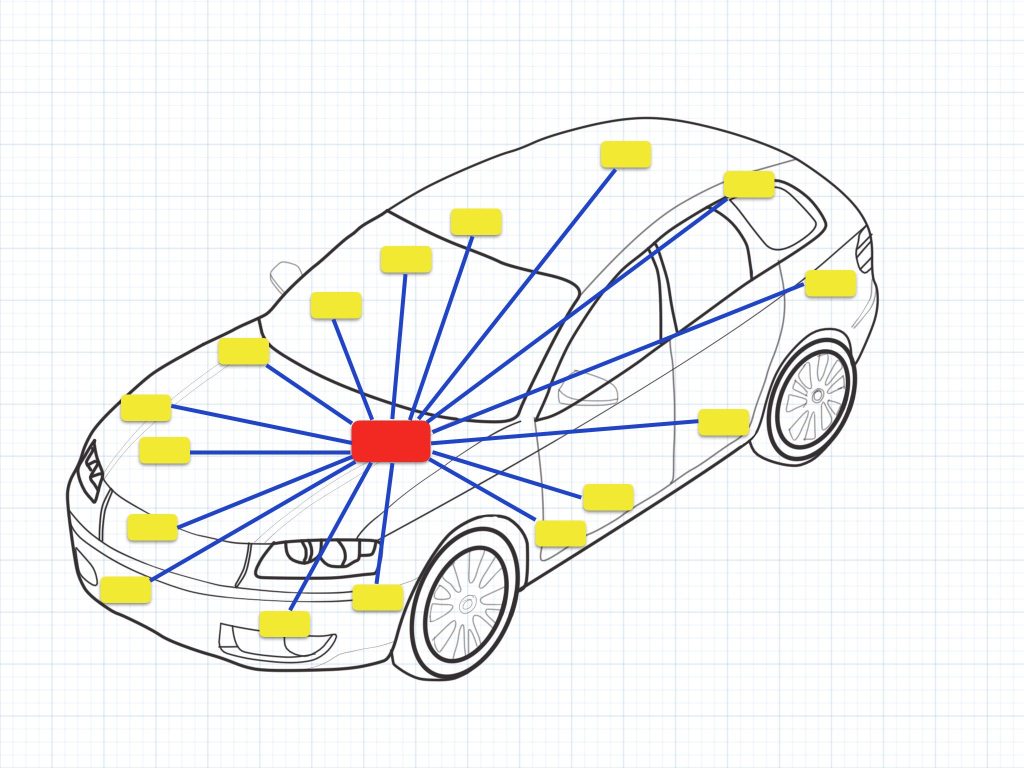
- Przede wszystkim zastosowanie magistrali CAN to znaczne zmniejszenie ilości przewodów i wtyczek tradycyjnej instalacji elektrycznej pojazdu, powodujące obniżenie poziomu awarii ww. podzespołów, a co za tym idzie zredukowanie masy pojazdu. W celu lepszego zrozumienia idei transmisji danych magistralą CAN, należy przeanalizować trzy warianty instalacji elektrycznej pojazdu. W przedstawionym przykładzie, pierwszy wariant instalacji będzie obejmować zespół pojedynczego sterownika i 16 sensorów (ilustracja 2).
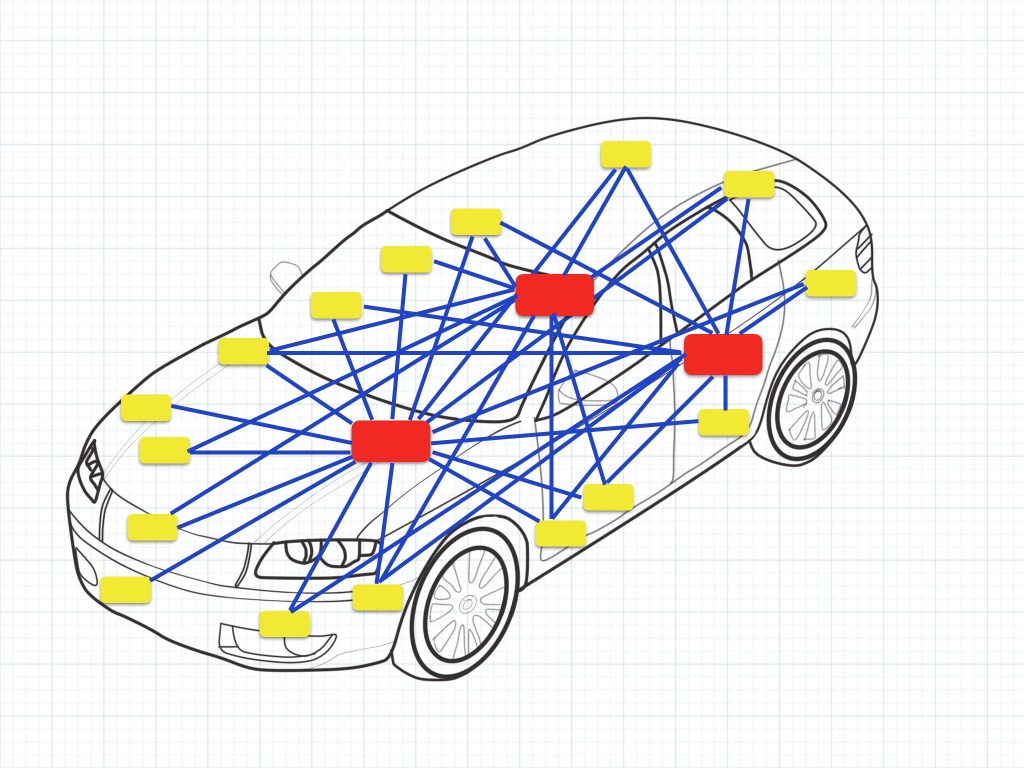
W sytuacji, gdy instalację rozbudujemy o kolejne dwa sterowniki (ilustracja 3), ilość przewodów potrzebnych do transmisji sygnałów pomiędzy trzema sterownikami i szesnastoma czujnikami znacząco wzrasta. Tak rozbudowana instalacja wpływa na zwiększenie liczby potencjalnych źródeł usterek i podnosi masę pojazdu.
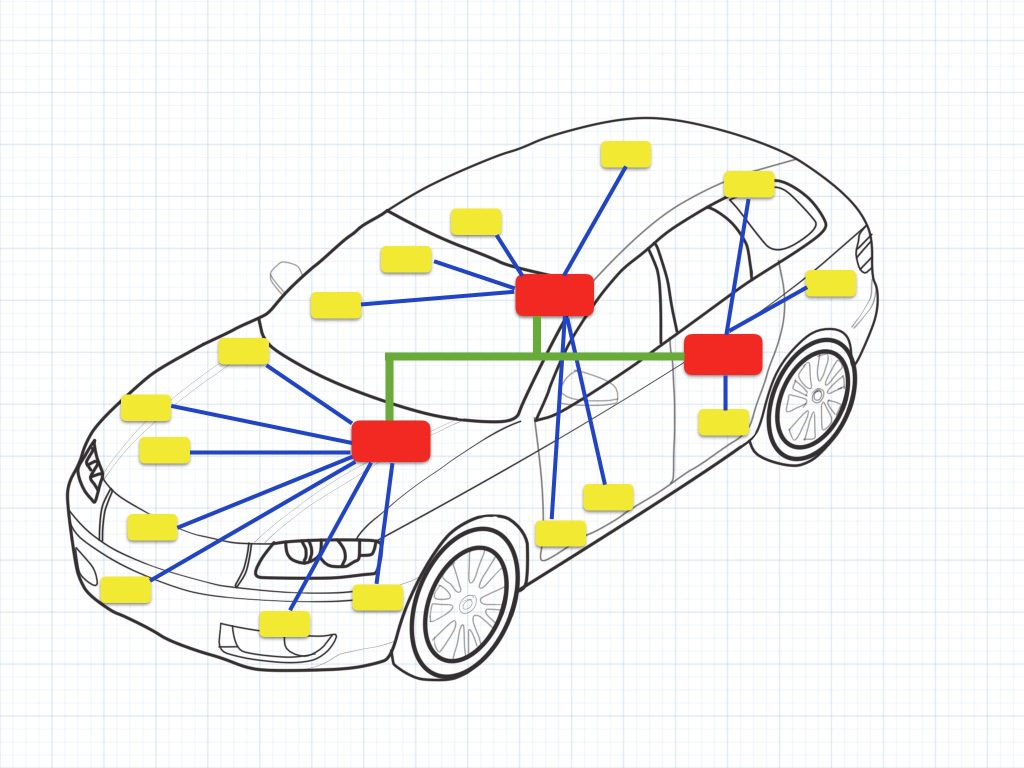
W przypadku gdy w pojeździe zrealizujemy wymianę danych za pośrednictwem magistrali CAN (Ilustracja 4), ilość oraz masa zastosowanych przewodów zasadniczo się obniża.
- Standard komunikacji jest zależny od ważności danego sygnału i wpływa bezpośrednio na prędkość transmisji. Priorytetowe informacje są przesyłane przez sterowniki układów bezpieczeństwa i napędowego, z kolei mniejszą wagę mają informacje ze sterowników układów komfortu, audio i nawigacji.
- Wygodny dozór przesyłu danych wraz ze zwiększeniem ich bezpieczeństwa.
- W pełni otwarta architektura systemu, umożliwiająca podłączenie kolejnego sterownika z wykorzystaniem transferu danych za pośrednictwem przewodów miedzianych lub światłowodowych.
- Zaawansowana diagnostyka poszczególnych sterowników.
- Niski poziom zakłóceń transmisji danych.
W praktyce, funkcjonowanie samochodowej magistrali CAN opiera się na transmisji danych pomiędzy poszczególnymi sterownikami realizowane dwoma skręconymi przewodami z ang. tzw. „Twisted Pair”. Tego typu połączenie minimalizuje zakłócenia oraz pozwala na „symetryczną” wymianę informacji, dlatego jeden z dwóch przewodów jest nazywany przewodem „high”, podczas gdy drugi oznacza się jako przewód „low”. Analizując parametry prędkości przesyłu danych, warto zauważyć, iż prędkość samochodowej magistrali CAN jest dosyć zróżnicowana i może przekraczać 1000 kbit/s, a pewne ograniczenia będą wynikać jedynie z szybkości przetwarzania informacji oraz limitów bufora pamięci danego sterownika.
Dlatego właśnie powszechnie przyjmuje się trzy charakterystyczne poziomy prędkości, gdzie dobrym przykładem do zaprezentowania będzie standard prędkości przesyłu danych koncernu Volkswagena, w którym:
1) Magistrala CAN napędu (High Speed CAN) charakteryzuje się szybkością transferu danych wynoszącą ponad 1000 kbit/s, i jest zarezerwowana dla sterowników: jednostki napędowej, automatycznej skrzyni biegów, układów ESP/ABS, czy też poduszek bezpieczeństwa. Najwyższy priorytet informacji przesyłanych magistralą CAN napędu, odpowiada szybkości transferu realizowany praktyczne w czasie rzeczywistym.
2) Magistrala CAN komfortu (Low Speed CAN) w której prędkość przesyłu danych wynosi około 500 kbit/s, obejmując zakresem wymianę informacji ze sterowników odpowiadających za komfort jazdy.
3) Magistrala CAN Infotainment (Low Speed CAN) w której szybkość transmisji danych wynosi ponad 100 kbit/s, przetwarzając dane ze sterowników systemów multimedialnych takich jak systemy audio czy nawigacji.


